International
ADVANCED AND APPLIED SCIENCES
EISSN: 2313-3724, Print ISSN: 2313-626X
Frequency: 12
![]()
Volume 13, Issue 3 (March 2026), Pages: 198-206

----------------------------------------------
Original Research Paper
Consensus-based model predictive control for scalable multi-robot coordination
Author(s):
Affiliation(s):
Department of Information Technology, Faculty of Computing and Information Technology, Northern Border University, Rafha, Saudi Arabia
Full text

* Corresponding Author.
 Corresponding author's ORCID profile: https://orcid.org/0000-0001-5957-6467
Corresponding author's ORCID profile: https://orcid.org/0000-0001-5957-6467
Digital Object Identifier (DOI)
https://doi.org/10.21833/ijaas.2026.03.020
Abstract
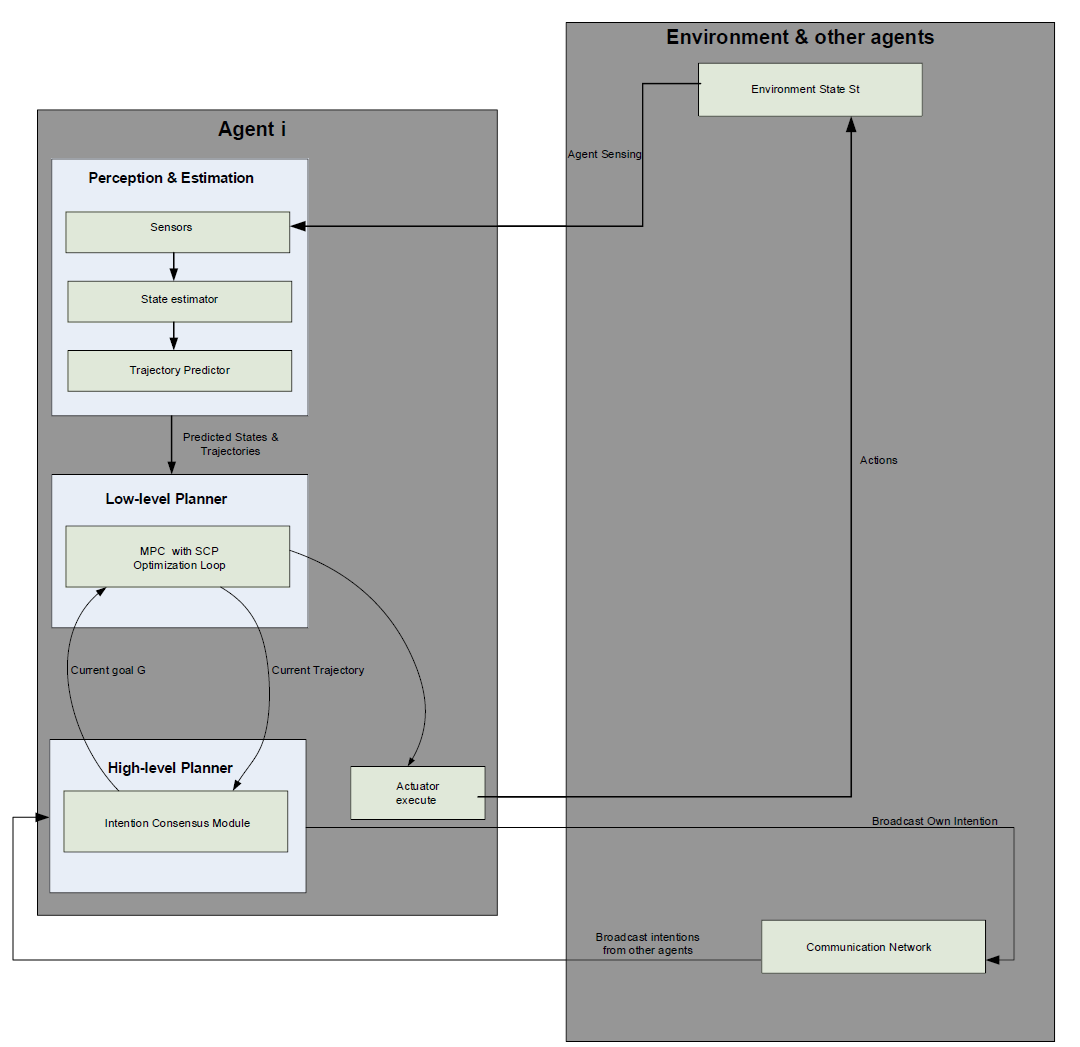
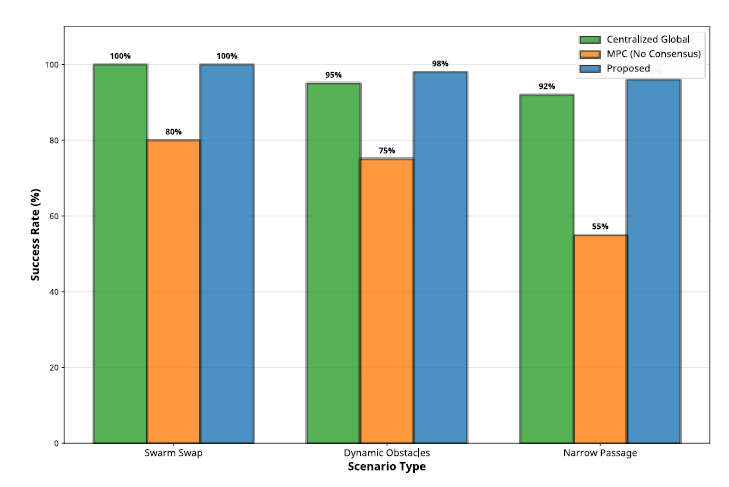
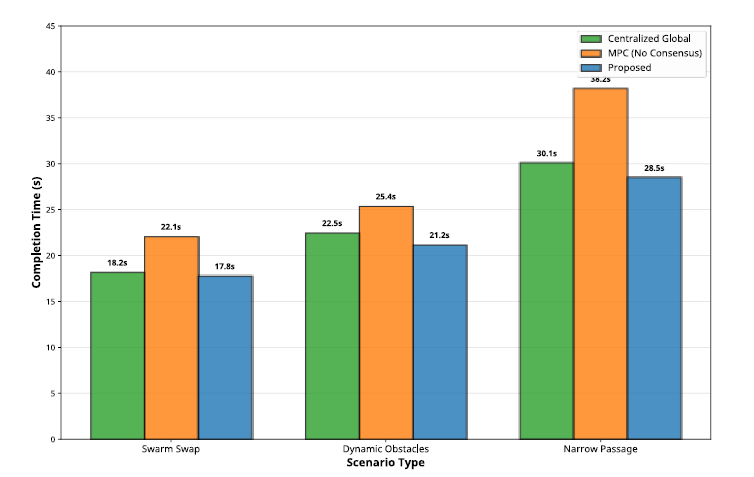
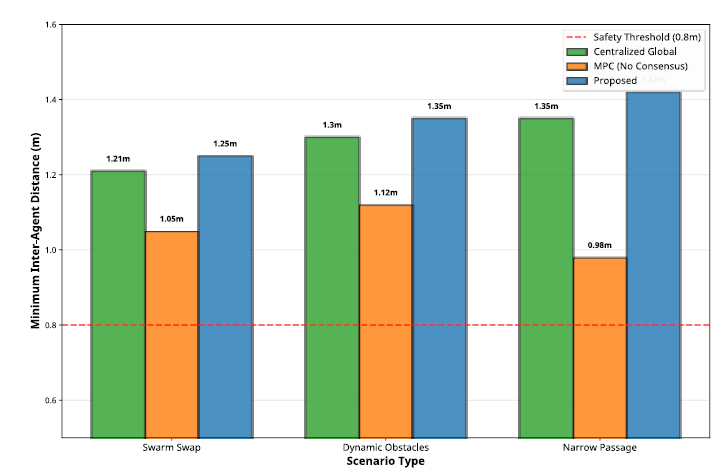
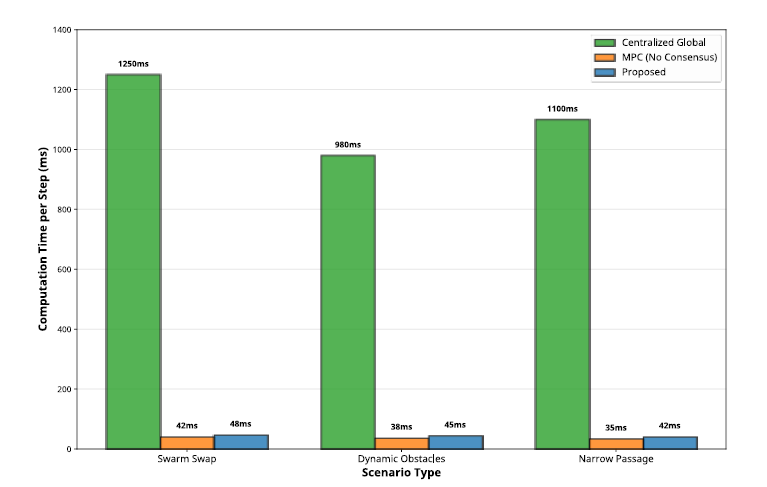
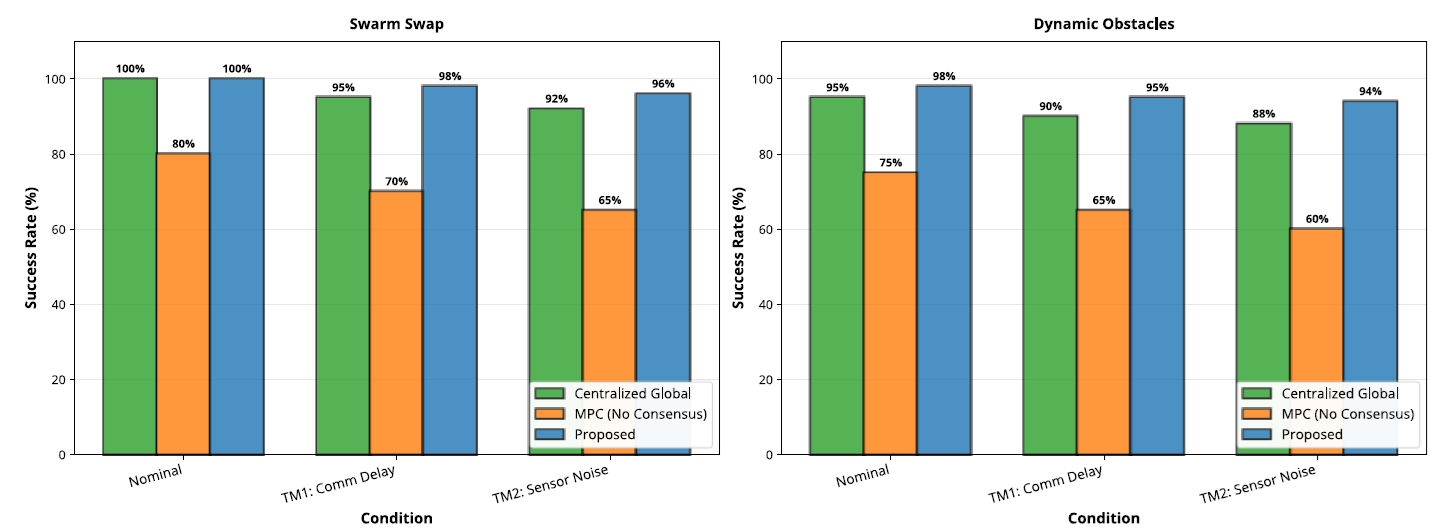
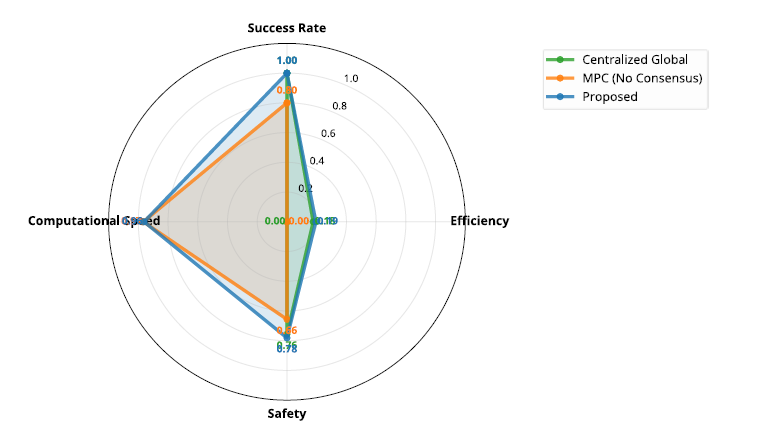
Creating scalable, secure, and real-time coordination in decentralized multi-agent systems remains a major challenge. Centralized planning approaches often suffer from limited scalability and weak robustness, while purely decentralized methods may lead to inefficient behavior or deadlocks. This paper proposes a hierarchical framework that integrates Decentralized Model Predictive Control (MPC) with an intention-sharing consensus protocol. The coordination problem is formulated as a constrained stochastic optimal control problem, and Sequential Convex Programming (SCP) is applied to efficiently solve the non-convex trajectory optimization problems encountered by individual agents at the local level. At the higher level, a consensus protocol enables agents to actively resolve conflicts and align their intentions, thereby reducing short-sighted decision-making. Extensive simulations on challenging benchmark scenarios show that the proposed approach achieves performance close to centralized methods and significantly outperforms existing reactive and predictive baselines in terms of success rate, efficiency, and safety. Furthermore, the method demonstrates strong robustness to communication delays, sensor noise, and model uncertainty, indicating its suitability for real-world applications.
© 2026 The Authors. Published by IASE.
This is an
Keywords
Multi-agent systems, Decentralized model predictive control, Consensus protocols, Sequential convex programming, Trajectory optimization
Article history
Received 18 October 2025, Received in revised form 10 March 2026, Accepted 14 March 2026
Acknowledgment
The author gratefully acknowledges the Deanship of Scientific Research at Northern Border University, Arar, KSA, for funding this research work through the project number “NBU-FFR-2025-1662-01.”
Compliance with ethical standards
Conflict of interest: The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.Citation:
Alrslani FAF (2026). Consensus-based model predictive control for scalable multi-robot coordination. International Journal of Advanced and Applied Sciences, 13(3): 198-206
Figures
Fig. 1 Fig. 2 Fig. 3 Fig. 4 Fig. 5 Fig. 6 Fig. 7
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tables
No Table
----------------------------------------------
References (13)
Azevedo BF, Rocha AMA, and Pereira AI (2024). Hybrid approaches to optimization and machine learning methods: A systematic literature review. Machine Learning, 113: 4055-4097. https://doi.org/10.1007/s10994-023-06467-x [Google Scholar]
Canese L, Cardarilli GC, Di Nunzio L, Fazzolari R, Giardino D, Re M, and Spanò S (2021). Multi-agent reinforcement learning: A review of challenges and applications. Applied Sciences, 11(11): 4948. https://doi.org/10.3390/app11114948 [Google Scholar]
De Sá DFS and Neto JVD (2023). Multi-agent collision avoidance system based on centralization and decentralization control for UAV applications. IEEE Access, 11: 7031-7042. https://doi.org/10.1109/ACCESS.2023.3235595 [Google Scholar]
Gul F, Mir A, Mir I, Mir S, Islaam TU, Abualigah L, and Forestiero A (2022). A centralized strategy for multi-agent exploration. IEEE Access, 10: 126871-126884. https://doi.org/10.1109/ACCESS.2022.3218653 [Google Scholar]
Guo K, Wang D, Fan T, and Pan J (2021). VR-ORCA: Variable responsibility optimal reciprocal collision avoidance. IEEE Robotics and Automation Letters, 6(3): 4520-4527. https://doi.org/10.1109/LRA.2021.3067851 [Google Scholar]
Huang L, Coulson J, Lygeros J, and Dörfler F (2021). Decentralized data-enabled predictive control for power system oscillation damping. IEEE Transactions on Control Systems Technology, 30(3): 1065-1077. https://doi.org/10.1109/TCST.2021.3088638 [Google Scholar]
Lazar EA, Lu J, and Rycroft CH (2022). Voronoi cell analysis: The shapes of particle systems. American Journal of Physics, 90(6): 469-480. https://doi.org/10.1119/5.0087591 [Google Scholar]
Liu K, Li N, Tseng HE, Kolmanovsky I, and Girard A (2022). Interaction-aware trajectory prediction and planning for autonomous vehicles in forced merge scenarios. IEEE Transactions on Intelligent Transportation Systems, 24(1): 474-488. https://doi.org/10.1109/TITS.2022.3216792 [Google Scholar]
Okpoti ES and Jeong IJ (2021). A reactive decentralized coordination algorithm for event-driven production planning and control: A cyber-physical production system prototype case study. Journal of Manufacturing Systems, 58: 143-158. https://doi.org/10.1016/j.jmsy.2020.11.002 [Google Scholar]
Schader M and Luke S (2021). Fully decentralized planner-guided robot swarms. In: Dignum F, Corchado JM, and De La Prieta F (Eds.), Advances in practical applications of agents, multi-agent systems, and social good. The PAAMS Collection. PAAMS 2021. Lecture Notes in Computer Science, 12946: 241-254. Springer, Cham, Switzerland. https://doi.org/10.1007/978-3-030-85739-4_20 [Google Scholar]
Scheffe P, Henneken TM, Kloock M, and Alrifaee B (2022). Sequential convex programming methods for real-time optimal trajectory planning in autonomous vehicle racing. IEEE Transactions on Intelligent Vehicles, 8(1): 661-672. https://doi.org/10.1109/TIV.2022.3168130 [Google Scholar]
Toumieh C and Lambert A (2022). Decentralized multi-agent planning using model predictive control and time-aware safe corridors. IEEE Robotics and Automation Letters, 7(4): 11110-11117. https://doi.org/10.1109/LRA.2022.3196777 [Google Scholar]
- Zhang Z, Han R, and Pan J (2021). An efficient centralized planner for multiple automated guided vehicles at the crossroad of polynomial curves. IEEE Robotics and Automation Letters, 7(1): 398-405. https://doi.org/10.1109/LRA.2021.3124093 [Google Scholar]