International
ADVANCED AND APPLIED SCIENCES
EISSN: 2313-3724, Print ISSN: 2313-626X
Frequency: 12
![]()
Volume 10, Issue 2 (February 2023), Pages: 99-106

----------------------------------------------
Original Research Paper
Robust fault-tolerant tracking control for a class of T-S fuzzy systems subject to actuator failure and external disturbance
Author(s):
S. Alkaik, M. Kchaou *
Affiliation(s):
College of Engineering, University of Hail, Hail, Saudi Arabia

* Corresponding Author.
 Corresponding author's ORCID profile: https://orcid.org/0000-0002-6849-1745
Corresponding author's ORCID profile: https://orcid.org/0000-0002-6849-1745
Digital Object Identifier:
https://doi.org/10.21833/ijaas.2023.02.013
Abstract:
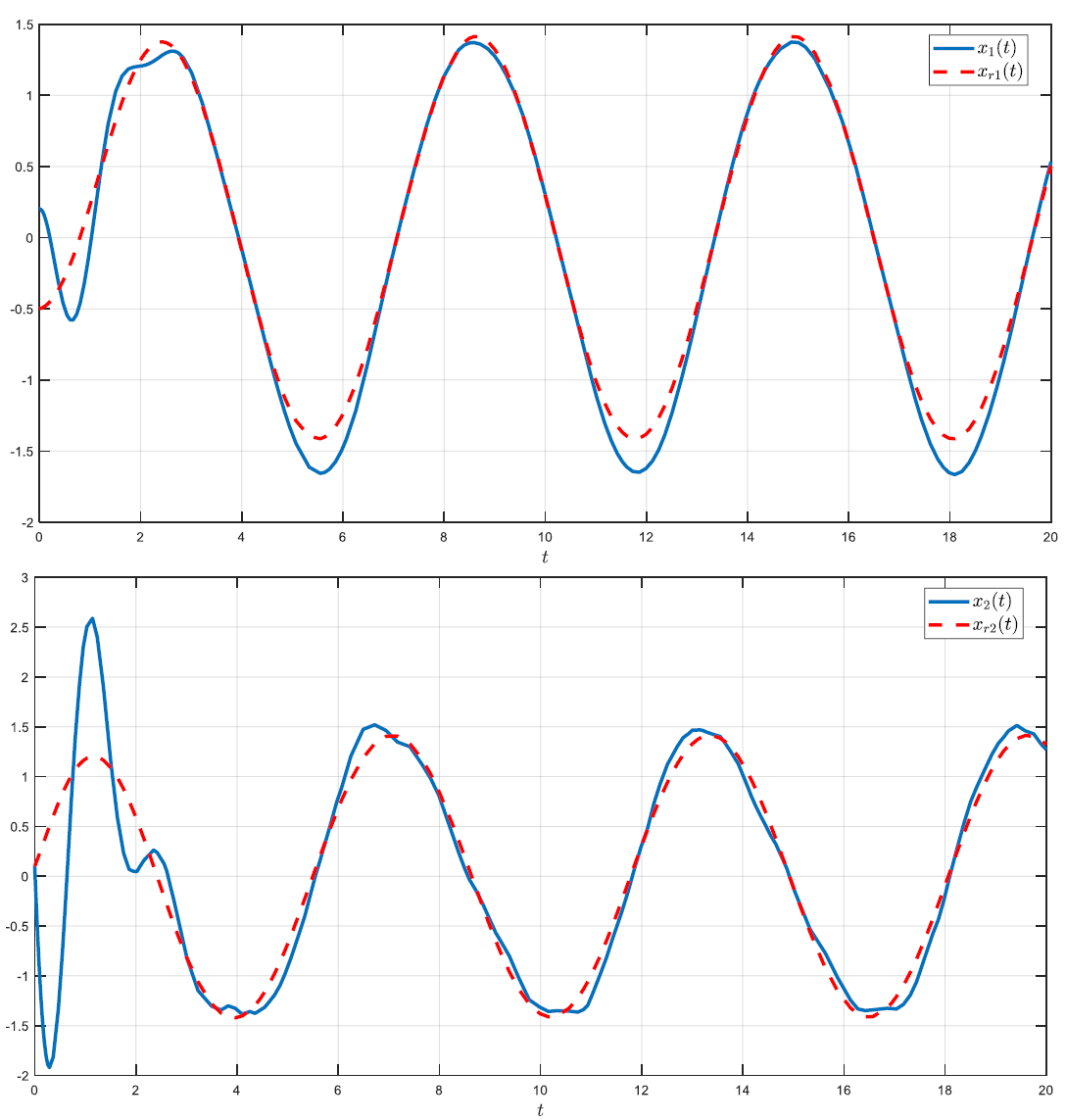
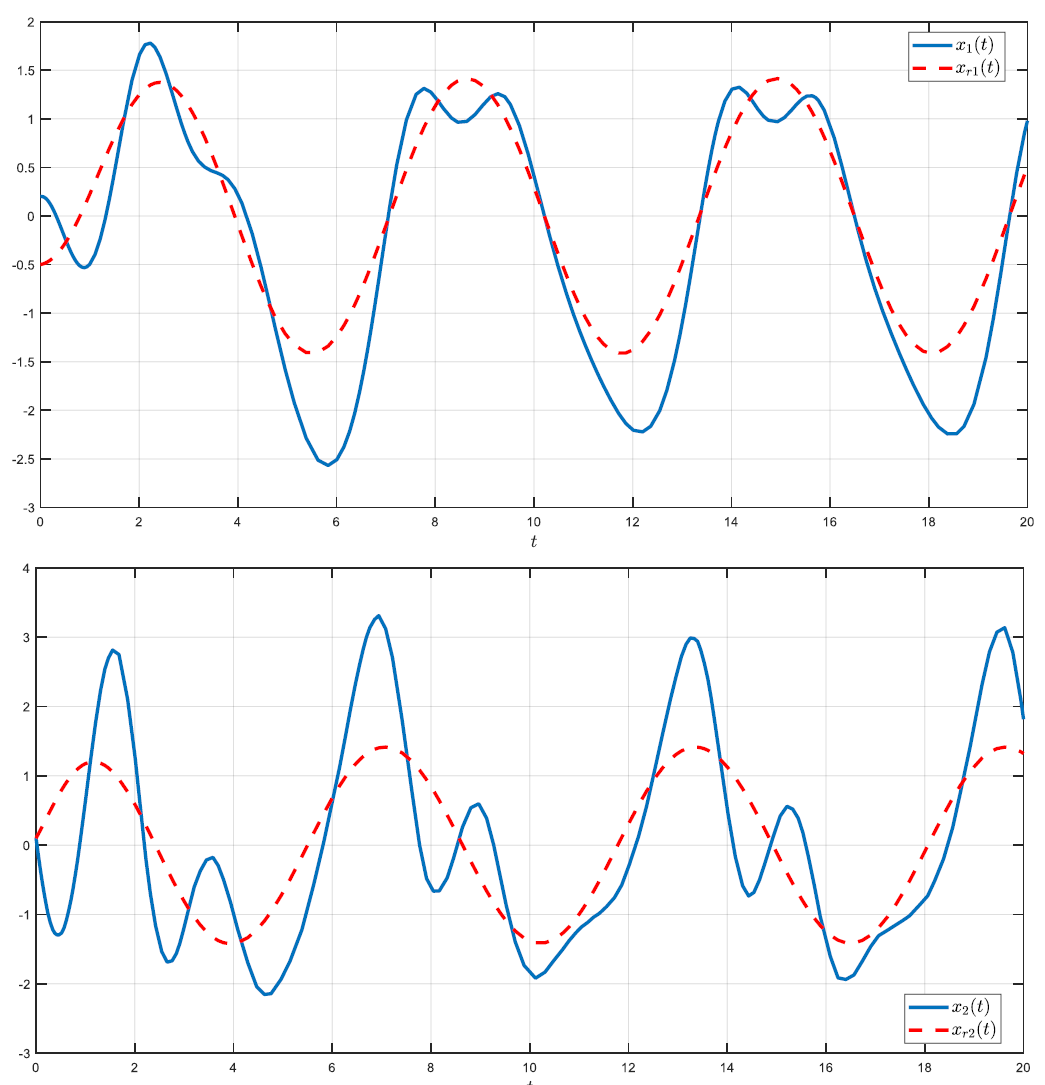
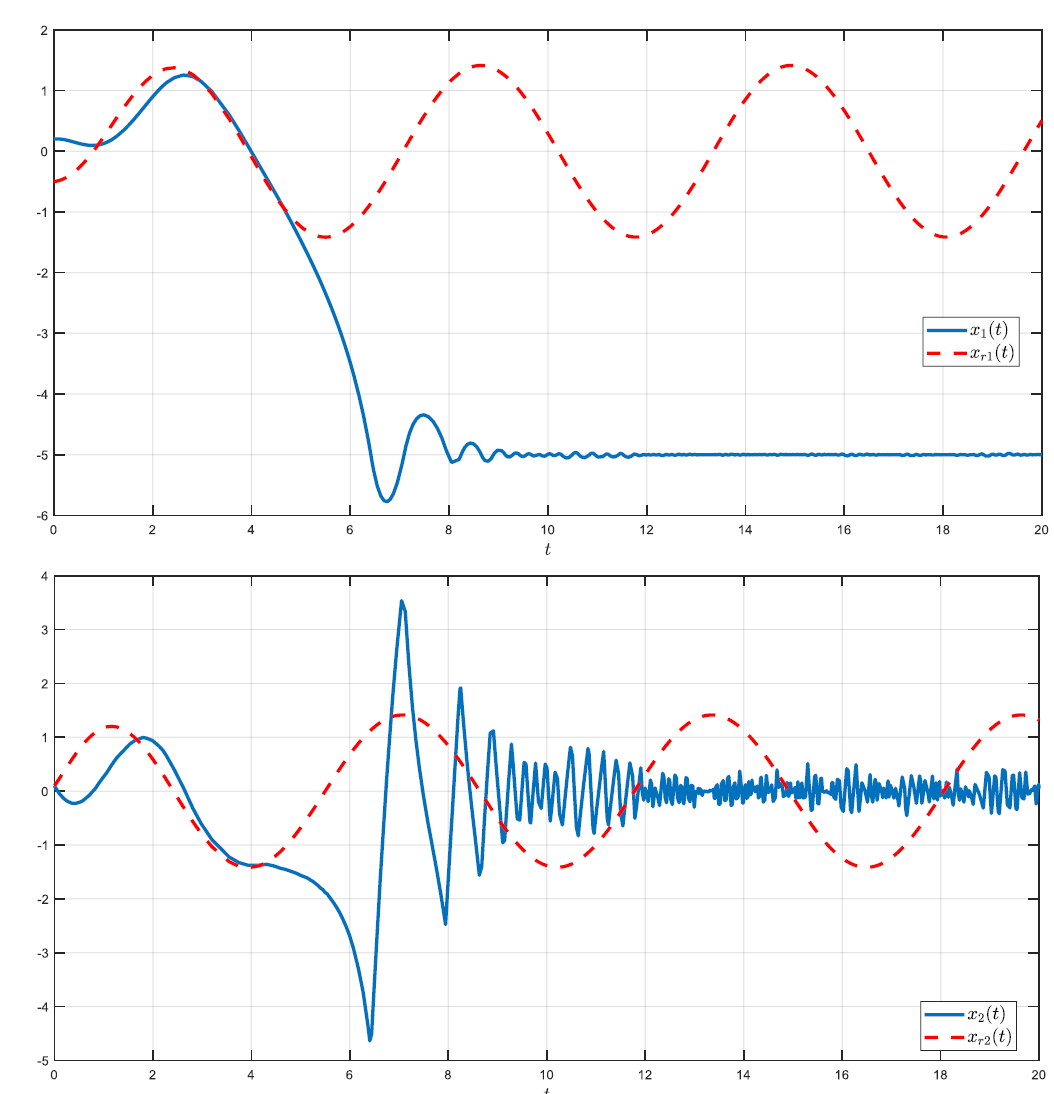
Based on the Takagi-Sugeno (T-S) fuzzy model approach, this study discusses the robust fault-tolerant tracking controller design for non-linear systems affected by external disturbances, uncertainties, and actuator failures. In contrast to existing results, this study assumes the actuator fault model includes linear and nonlinear terms, and a state feedback controller is designed to improve the tracking and stability of the system when actuators fail. Using a non-quadratic Lyapunov function, new sufficient conditions for L2-gain tracking performance analysis are derived to determine simultaneously the minimal level of the L2-gain and controller gains. The robustness of the proposed approach is also investigated. An illustration of the theoretical developments is provided by a Duffing forced oscillation system.
© 2022 The Authors. Published by IASE.
This is an
Keywords: T-S fuzzy model, Tracking control, 𝐿2-gain performance, Fault-tolerant control, LMI
Article History: Received 8 August 2022, Received in revised form 31 October 2022, Accepted 2 November 2022
Acknowledgment
This research has been funded by Scientific Research Deanship at the University of Ha’il -Saudi Arabia through project number GR-22019.
Compliance with ethical standards
Conflict of interest: The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Citation:
Alkaik S and Kchaou M (2023). Robust fault-tolerant tracking control for a class of T-S fuzzy systems subject to actuator failure and external disturbance. International Journal of Advanced and Applied Sciences, 10(2): 99-106
Figures
{kind=link}
{kind=link}
{kind=link}
Tables
{kind=link}
----------------------------------------------
References (24)
- Chang YC and Yen HM (2005). Adaptive output feedback tracking control for a class of uncertain nonlinear systems using neural networks. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 35(6): 1311-1316. https://doi.org/10.1109/TSMCB.2005.850158 [Google Scholar] PMid:16366255
- Chu X and Li M (2019). Observer-based model following sliding mode tracking control of discrete-time linear networked systems with two-channel event-triggered schemes and quantizations. Applied Mathematics and Computation, 355: 428-448. https://doi.org/10.1016/j.amc.2019.03.010 [Google Scholar]
- Fu L, Lam HK, Liu F, Zhou H, and Zhong Z (2022). Robust tracking control of interval type-2 positive Takagi-Sugeno fuzzy systems with external disturbance. IEEE Transactions on Fuzzy Systems, 30(10): 4057-4068. https://doi.org/10.1109/TFUZZ.2021.3136926 [Google Scholar]
- Gu Z, Yue D, Liu J, and Ding Z (2017). H∞ tracking control of nonlinear networked systems with a novel adaptive event-triggered communication scheme. Journal of the Franklin Institute, 354(8): 3540-3553. https://doi.org/10.1016/j.jfranklin.2017.02.020 [Google Scholar]
- Kamal E, Aitouche A, and Oueidat M (2013). Fuzzy fault-tolerant control of wind-diesel hybrid systems subject to sensor faults. IEEE Transactions on Sustainable Energy, 4(4): 857-866. https://doi.org/10.1109/TSTE.2013.2253138 [Google Scholar]
- Kang HB and Lee HJ (2018). Sampled-data static output-feedback control for nonlinear systems in T–S form via descriptor redundancy. Neurocomputing, 318: 1-6. https://doi.org/10.1016/j.neucom.2018.06.048 [Google Scholar]
- Kaviarasan B, Sakthivel R, and Kwon OM (2016). Robust fault-tolerant control for power systems against mixed actuator failures. Nonlinear Analysis: Hybrid Systems, 22: 249-261. https://doi.org/10.1016/j.nahs.2016.05.003 [Google Scholar]
- Kchaou M, Gassara H, and El‐Hajjaji A (2018). Adaptive sliding mode control for fuzzy singular systems with time delay and input nonlinearity. International Journal of Adaptive Control and Signal Processing, 32(3): 464-479. https://doi.org/10.1002/acs.2854 [Google Scholar]
- Kchaou M, Jerbi H, Abassi R, VijiPriya J, Hmidi F, and Kouzou A (2021). Passivity-based asynchronous fault-tolerant control for nonlinear discrete-time singular Markovian jump systems: A sliding-mode approach. European Journal of Control, 60: 95-113. https://doi.org/10.1016/j.ejcon.2021.04.004 [Google Scholar]
- Kchaou M, Toumi A, and Souissi M (2011). Delay-dependent H∞ resilient output fuzzy control for nonlinear discrete-time systems with time-delay. International Journal of Uncertainty, Fuzziness and Knowledge-Based Systems, 19(2): 229-250. https://doi.org/10.1142/S0218488511006988 [Google Scholar]
- Latrach C, Kchaou M, Rabhi A, and El Hajjaji A (2015). Decentralized networked control system design using Takagi-Sugeno (TS) fuzzy approach. International Journal of Automation and Computing, 12(2): 125-133. https://doi.org/10.1007/s11633-015-0879-9 [Google Scholar]
- Latrech C, Kchaou M, and Guéguen H (2018). Networked non-fragile H∞ static output feedback control design for vehicle dynamics stability: A descriptor approach. European Journal of Control, 40: 13-26. https://doi.org/10.1016/j.ejcon.2017.10.005 [Google Scholar]
- Li A, Liu M, Cao X, and Liu R (2022). Adaptive quantized sliding mode attitude tracking control for flexible spacecraft with input dead-zone via Takagi-Sugeno fuzzy approach. Information Sciences, 587: 746-773. https://doi.org/10.1016/j.ins.2021.11.002 [Google Scholar]
- Makni S, Bouattour M, El Hajjaji A, and Chaabane M (2019). Robust observer based fault tolerant tracking control for T–S uncertain systems subject to sensor and actuator faults. ISA Transactions, 88: 1-11. https://doi.org/10.1016/j.isatra.2018.11.022 [Google Scholar] PMid:30545772
- Shi H, Li P, Cao J, Su C, and Yu J (2020). Robust fuzzy predictive control for discrete-time systems with interval time-varying delays and unknown disturbances. IEEE Transactions on Fuzzy Systems, 28(7): 1504-1516. https://doi.org/10.1109/TFUZZ.2019.2959539 [Google Scholar]
- Takagi T and Sugeno M (1985). Fuzzy identification of systems and its applications to modeling and control. IEEE Transactions on Systems, Man, and Cybernetics, 15(1): 116-132. https://doi.org/10.1109/TSMC.1985.6313399 [Google Scholar]
- Tao J, Lu R, Su H, Shi P, and Wu ZG (2018). Asynchronous filtering of nonlinear Markov jump systems with randomly occurred quantization via T–S fuzzy models. IEEE Transactions on Fuzzy Systems, 26(4): 1866-1877. https://doi.org/10.1109/TFUZZ.2017.2754999 [Google Scholar]
- Tuan HD, Apkarian P, Narikiyo T, and Yamamoto Y (2001). Parameterized linear matrix inequality techniques in fuzzy control system design. IEEE Transactions on Fuzzy Systems, 9(2): 324-332. https://doi.org/10.1109/91.919253 [Google Scholar]
- Wang S, Jiang Y, Li Y, and Liu D (2015). Reliable observer-based H∞ control for discrete-time fuzzy systems with time-varying delays and stochastic actuator faults via scaled small gain theorem. Neurocomputing, 147: 251-259. https://doi.org/10.1016/j.neucom.2014.06.069 [Google Scholar]
- Wang Y, Shi P, and Yan H (2018). Reliable control of fuzzy singularly perturbed systems and its application to electronic circuits. IEEE Transactions on Circuits and Systems I: Regular Papers, 65(10): 3519-3528. https://doi.org/10.1109/TCSI.2018.2834481 [Google Scholar]
- Xie L (1996). Output feedback H∞ control of systems with parameter uncertainty. International Journal of Control, 63(4): 741-750. https://doi.org/10.1080/00207179608921866 [Google Scholar]
- Yan H, Wang J, Wang F, Wang Z, and Zou S (2019). Observer-based reliable passive control for uncertain T–S fuzzy systems with time-delay. International Journal of Systems Science, 50(5): 905-918. https://doi.org/10.1080/00207721.2019.1585996 [Google Scholar]
- Zhang D, Han QL, and Jia X (2015). Network-based output tracking control for a class of TS fuzzy systems that can not be stabilized by nondelayed output feedback controllers. IEEE Transactions on Cybernetics, 45(8): 1511-1524. https://doi.org/10.1109/TCYB.2014.2354421 [Google Scholar] PMid:25222965
- Zhang D, Han QL, and Jia XC (2014). Observer‐based H∞ output tracking control for networked control systems. International Journal of Robust and Nonlinear Control, 24(17): 2741-2760. https://doi.org/10.1002/rnc.3021 [Google Scholar]