International
ADVANCED AND APPLIED SCIENCES
EISSN: 2313-3724, Print ISSN: 2313-626X
Frequency: 12
![]()
Volume 8, Issue 11 (November 2021), Pages: 22-29

----------------------------------------------
Original Research Paper
Title: Development of soft actuators for stroke rehabilitation using deep learning
Author(s): Naif Khalaf Al-Shammari 1, *, Ahmed S. Alshammari 2, Saleh Mohammd Albadarn 2, Syed Thouheed Ahmed 3, Syed Muzamil Basha 3, Ahmed A. Alzamil 4, Ahmed Maher Gabr 4
Affiliation(s):
1Mechanical Engineering, University of Ha’il, Ha’il, Saudi Arabia
2Electrical Engineering Department, University of Ha’il, Ha’il, Saudi Arabia
3School of Computing and Information Technology, REVA University, Bangalore, India
4Physical Therapy Department, Faculty of Applied Medical Sciences, University of Ha’il, Ha’il, Saudi Arabia

* Corresponding Author.
 Corresponding author's ORCID profile: https://orcid.org/0000-0001-5100-267X
Corresponding author's ORCID profile: https://orcid.org/0000-0001-5100-267X
Digital Object Identifier:
https://doi.org/10.21833/ijaas.2021.11.003
Abstract:
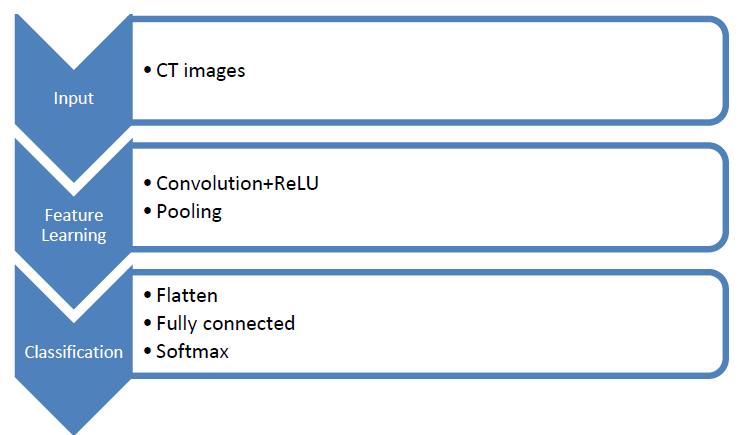
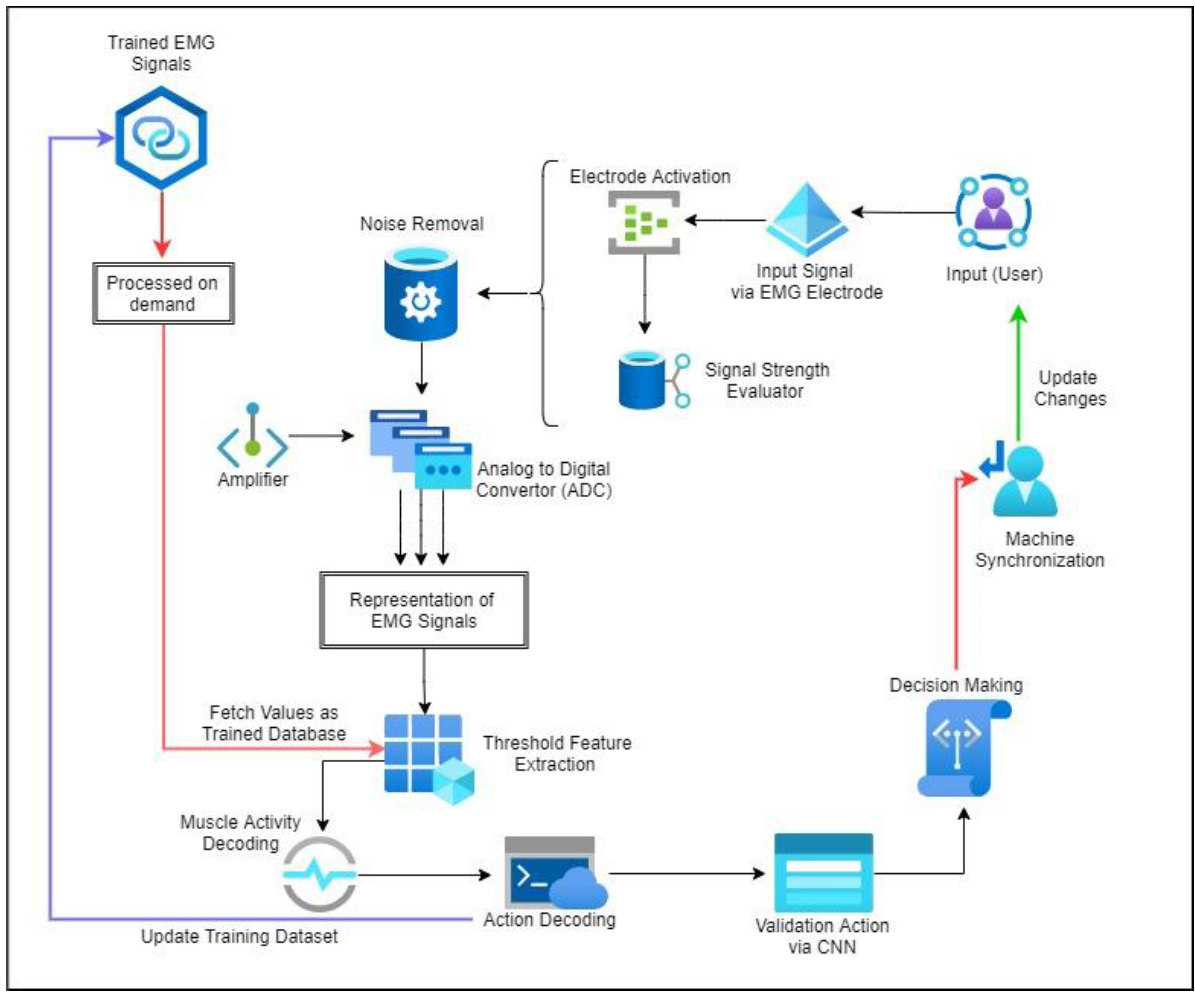
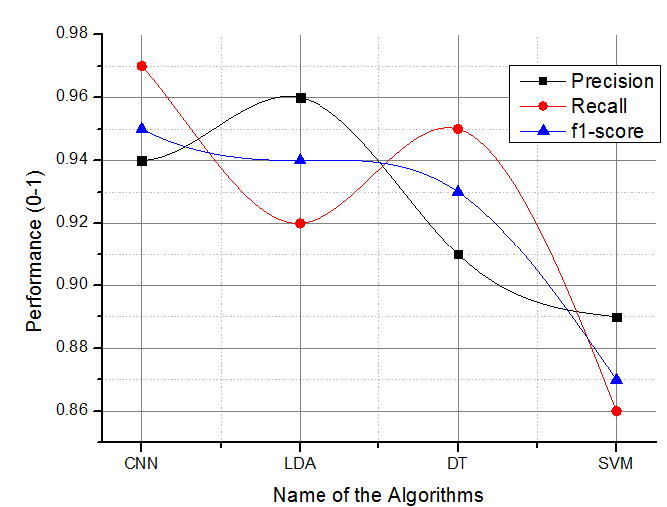
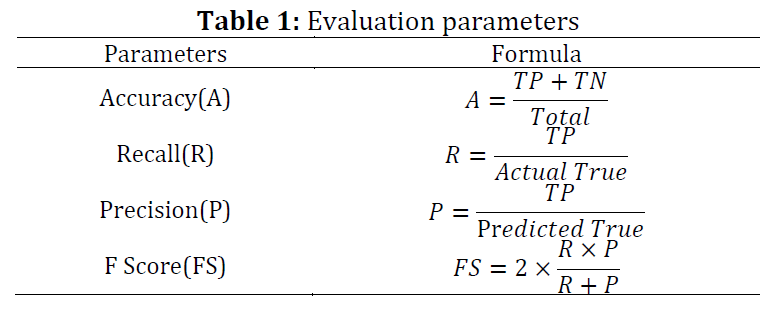
Automation has created a mind-blowing impact in diversified fields all over the world. Not only in business but also in various domains like health care sectors, manufacturing, etc. a faultless execution is a prime concern. Robotic Process Automation has paved the way for research in the mechanical and mechatronics field. Software robots are trained well to complete repetitive tasks in an efficient manner. A design of such a soft robot can be greatly helpful in the arena of healing. Automation of Rehabilitation therapy has gained attention in recent years. The main aspiration towards the conduct of this research work is to accomplish a soft exoskeleton robot using a thin McKibben actuator applying Deep Learning approaches to aid automatic therapy to the paralyzed patients and help them carry out the hand movement-based exercises. Convolutional Neural Network (CNN) algorithm will be used to support the training of the AI-enabled automated device. The proposed methodology will support stroke survivors to perform exercises independently to enhance their hand motor recovery. For this purpose, it involves pneumatic soft actuator technology using thin McKibben artificial muscles to create a cognitive potential to induce rehabilitation. A soft actuator is proposed so as to confirm the safety purposes of stroke patients.
© 2021 The Authors. Published by IASE.
This is an
Keywords: Soft exoskeleton robot, McKibben actuator, Convolutional neural network, Pneumatic soft actuator
Article History: Received 23 May 2021, Received in revised form 10 August 2021, Accepted 26 August 2021
Acknowledgment
This research has been funded by Scientific Research Deanship at the University of Ha’il-Saudi Arabia through project number RG-191344.
Compliance with ethical standards
Conflict of interest: The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Citation:
Al-Shammari NK, Alshammari AS, and Albadarn SM et al. (2021). Development of soft actuators for stroke rehabilitation using deep learning. International Journal of Advanced and Applied Sciences, 8(11): 22-29
Figures
Fig. 1 Fig. 2 Fig. 3 Fig. 4 Fig. 5 Fig. 6
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tables
{kind=link}
{kind=link}
----------------------------------------------
References (19)
- Alahmari K and Paul SS (2016). Prevalence of stroke in Kingdom of Saudi Arabia-Through a physiotherapist diary. Mediterranean Journal of Social Sciences, 7(1 S1): 228-228. https://doi.org/10.5901/mjss.2016.v7n1s1p228 [Google Scholar]
- Alhazzani AA, Mahfouz AA, Abolyazid AY, Awadalla NJ, Aftab R, Faraheen A, and Khalil SN (2018). Study of stroke incidence in the Aseer region, southwestern Saudi Arabia. International Journal of Environmental Research and Public Health, 15(2): 215. https://doi.org/10.3390/ijerph15020215 [Google Scholar] PMid:29373563 PMCid:PMC5858284
- Asadi H, Dowling R, Yan B, and Mitchell P (2014). Machine learning for outcome prediction of acute ischemic stroke post intra-arterial therapy. PLOS ONE, 9(2): e88225. https://doi.org/10.1371/journal.pone.0088225 [Google Scholar] PMid:24520356 PMCid:PMC3919736
- Asirvatham AR and Marwan MZ (2014). Stroke in Saudi Arabia: A review of the recent literature. Pan African Medical Journal, 17: 1. https://doi.org/10.11604/pamj.2014.17.14.3015 [Google Scholar] PMid:24932325 PMCid:PMC4048673
- Faudzi AAM, Razif MRM, Endo G, Nabae H, and Suzumori K (2017). Soft-amphibious robot using thin and soft McKibben actuator. In the IEEE International Conference on Advanced Intelligent Mechatronics, IEEE, Munich, Germany: 981-986. https://doi.org/10.1109/AIM.2017.8014146 [Google Scholar]
- Heo P, Gu GM, Lee SJ, Rhee K, and Kim J (2012). Current hand exoskeleton technologies for rehabilitation and assistive engineering. International Journal of Precision Engineering and Manufacturing, 13(5): 807-824. https://doi.org/10.1007/s12541-012-0107-2 [Google Scholar]
- Hillman M (2004). 2 rehabilitation robotics from past to present-A historical perspective. In: Bien ZZ and Stefanov D (Eds.), Advances in rehabilitation robotics: 25-44. Springer, Berlin, Heidelberg, Germany. https://doi.org/10.1007/10946978_2 [Google Scholar]
- Huang J, Huo W, Xu W, Mohammed S, and Amirat Y (2015). Control of upper-limb power-assist exoskeleton using a human-robot interface based on motion intention recognition. IEEE Transactions on Automation Science and Engineering, 12(4): 1257-1270. https://doi.org/10.1109/TASE.2015.2466634 [Google Scholar]
- Kamal H, Lopez V, and Sheth SA (2018). Machine learning in acute ischemic stroke neuroimaging. Frontiers in Neurology, 9: 945. https://doi.org/10.3389/fneur.2018.00945 [Google Scholar] PMid:30467491 PMCid:PMC6236025
- Krizhevsky A, Sutskever I, and Hinton GE (2012). ImageNet classification with deep convolutional neural networks. In the Proceedings of the 25th International Conference on Neural Information Processing Systems - Volume 1 (NIPS'12), Curran Associates Inc., Red Hook, USA: 1097–1105. [Google Scholar]
- LeCun Y, Bengio Y, and Hinton G (2015). Deep learning. Nature, 521(7553): 436-444. https://doi.org/10.1038/nature14539 [Google Scholar] PMid:26017442
- Lum P, Reinkensmeyer D, Mahoney R, Rymer WZ, and Burgar C (2002). Robotic devices for movement therapy after stroke: Current status and challenges to clinical acceptance. Topics in Stroke Rehabilitation, 8(4): 40-53. https://doi.org/10.1310/9KFM-KF81-P9A4-5WW0 [Google Scholar] PMid:14523729
- Noritsugu T, Takaiwa M, and Sasaki D (2008). Power assist wear driven with pneumatic rubber artificial muscles. In the 15th International Conference on Mechatronics and Machine Vision in Practice, IEEE, Auckland, New Zealand: 539-544. https://doi.org/10.1109/MMVIP.2008.4749589 [Google Scholar]
- Noritsugu T, Yamamoto H, Sasakil D, and Takaiwa M (2004). Wearable power assist device for hand grasping using pneumatic artificial rubber muscle. In SICE 2004 Annual Conference, IEEE, Sapporo, Japan, 1: 420-425. https://doi.org/10.1109/ROMAN.2004.1374840 [Google Scholar]
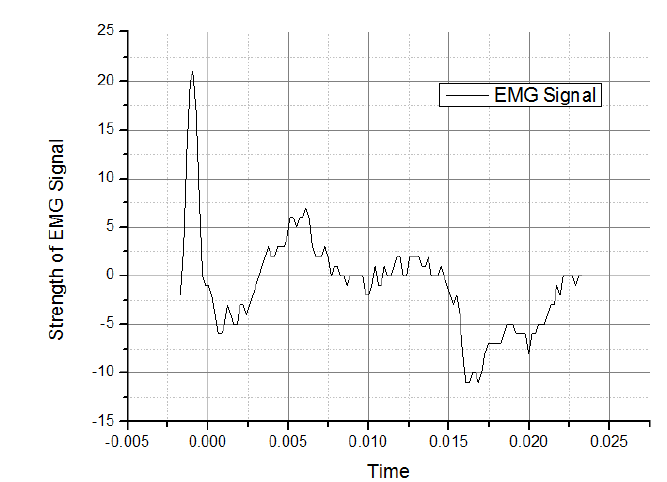
- Reaz MBI, Hussain MS, and Mohd-Yasin F (2006). Techniques of EMG signal analysis: Detection, processing, classification and applications. Biological Procedures Online, 8(1): 11-35. https://doi.org/10.1251/bpo115 [Google Scholar] PMid:16799694 PMCid:PMC1455479
- Sasaki D, Noritsugu T, and Takaiwa M (2005). Development of active support splint driven by pneumatic soft actuator (ASSIST). In the IEEE International Conference on Robotics and Automation, IEEE, Barcelona, Spain: 520-525. https://doi.org/10.1109/ROBOT.2005.1570171 [Google Scholar]
- Sathiyamoorthi V, Ilavarasi AK, Murugeswari K, Ahmed ST, Devi BA, and Kalipindi M (2021). A deep convolutional neural network based computer aided diagnosis system for the prediction of Alzheimer's disease in MRI images. Measurement, 171: 108838. https://doi.org/10.1016/j.measurement.2020.108838 [Google Scholar]
- Takaoka M, Suzumori K, Wakimoto S, Iijima K, and Tokumiya T (2013). Fabrication of thin McKibben artificial muscles with various design parameters and their experimental evaluations. In the 5th International Conference on Manufacturing, Machine Design and Tribology (ICMDT 2013). Available online at: https://www.dbpia.co.kr/Journal/articleDetail?nodeId=NODE02183699
- Yu J, Park S, Kwon SH, Ho CMB, Pyo CS, and Lee H (2020). AI-based stroke disease prediction system using real-time electromyography signals. Applied Sciences, 10(19): 6791. https://doi.org/10.3390/app10196791 [Google Scholar]