International
ADVANCED AND APPLIED SCIENCES
EISSN: 2313-3724, Print ISSN: 2313-626X
Frequency: 12
![]()
Volume 7, Issue 7 (July 2020), Pages: 1-6

----------------------------------------------
Original Research Paper
Title: Dynamics and energy recovery of a walking mechanism
Author(s): Elvedin Kljuno *, Alan Catovic, Marin Petrovic
Affiliation(s):
Mechanical Engineering Faculty, University of Sarajevo, Sarajevo, Bosnia and Herzegovina

* Corresponding Author.
 Corresponding author's ORCID profile: https://orcid.org/0000-0002-5532-8914
Corresponding author's ORCID profile: https://orcid.org/0000-0002-5532-8914
Digital Object Identifier:
https://doi.org/10.21833/ijaas.2020.07.001
Abstract:
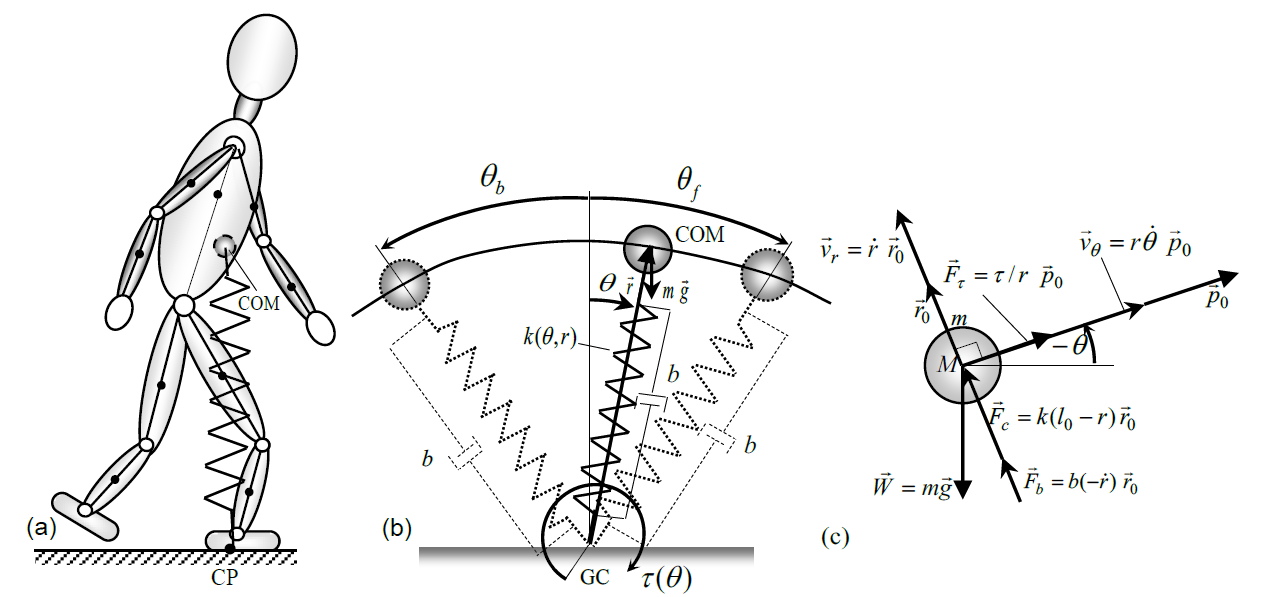
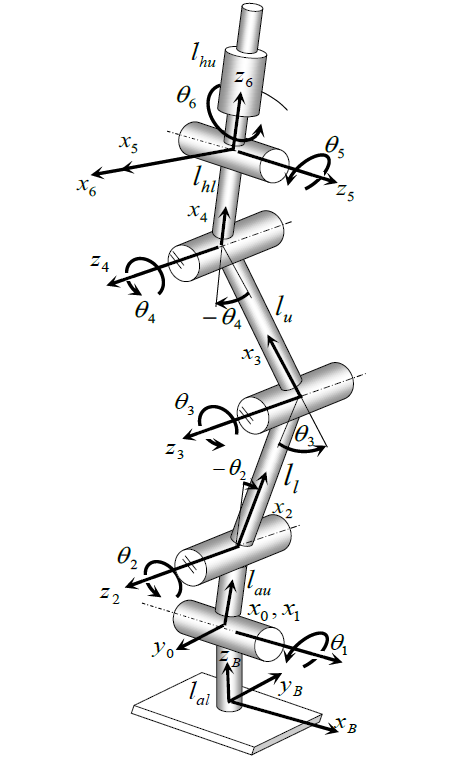
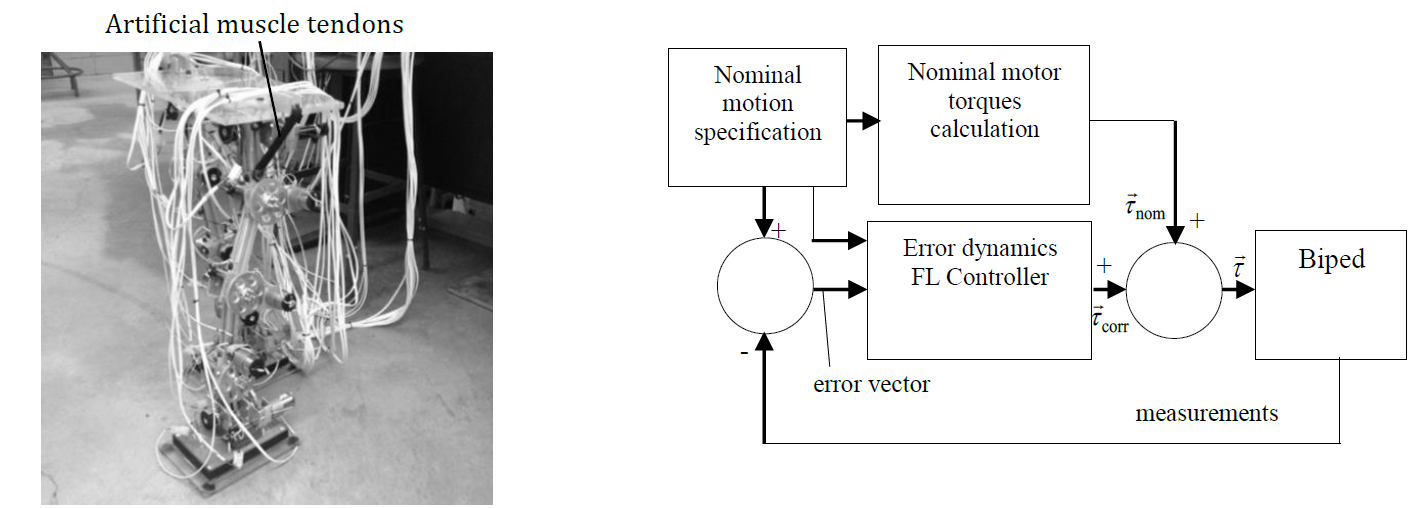
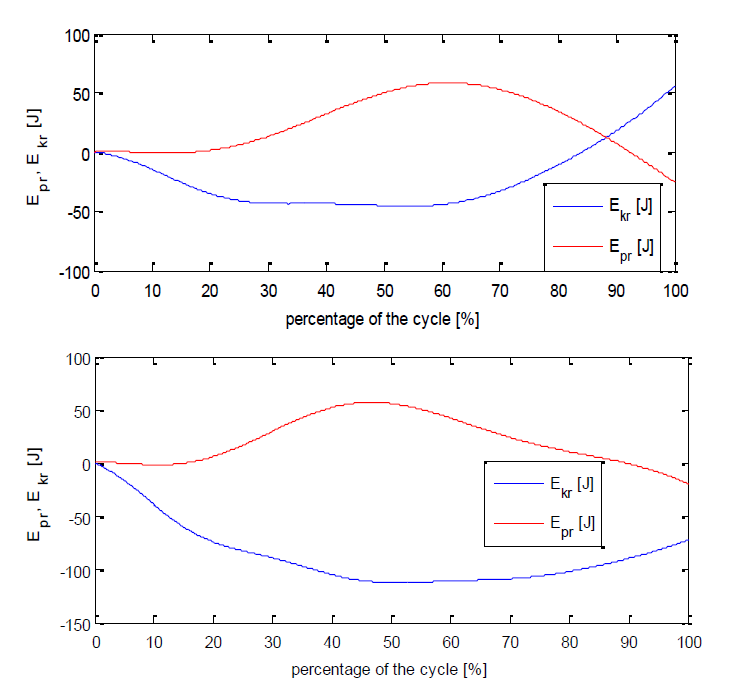
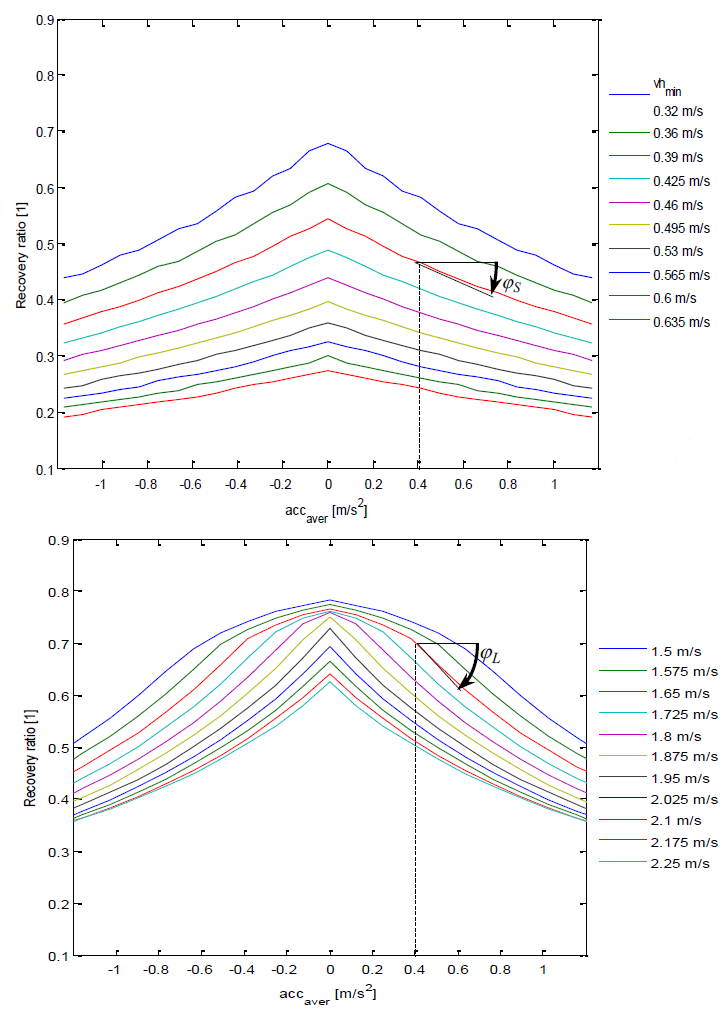
Nonlinearity and discontinuity in walking robot dynamics represent a challenge to find adequate control strategies. Walking mechanisms include combined open and closed mechanical chains (loops) consisted of (theoretically) rigid segments. These mechanisms have a relatively high number of degrees of freedom (DOF), which causes that dynamics are represented by complicated differential equations. Complexity is largely expanded if we consider the elasticity of materials within the walking mechanism. Unless we significantly simplify the model of walking mechanism dynamics, model-based controller implementation would require significant computational capacities embedded into the hardware. This paper presents dynamics modeling, controller design, and mechanical energy analysis of a walking robot with elastic strings. The paper shows how to analyze the capability of the walking mechanism with elastic elements to reuse mechanical energy throughout the walking cycle. Energy Recovery Ratio is an efficiency measure that is conceptually adopted from biology. The novelty introduced here is represented by a generalization of the parameter and the analysis to cover non-steady walk with interchanged accelerations and decelerations. The paper shows an analysis of the way biological walkers store and reuse energy cyclically during every step. The walking robot architecture with elastic strings mimics the biological architecture to a certain extent. Based on the kinematic and dynamic analysis of the robot, the mathematical model is formed, which is then used for the controller design implemented in hardware.
© 2020 The Authors. Published by IASE.
This is an
Keywords: Walking robot, String-driven, Mechanical energy, Controller
Article History: Received 5 January 2020, Received in revised form 22 March 2020, Accepted 23 March 2020
Acknowledgment:
No Acknowledgment.
Compliance with ethical standards
Conflict of interest: The authors declare that they have no conflict of interest.
Citation:
Kljuno E, Catovic A, and Petrovic M (2020). Dynamics and energy recovery of a walking mechanism. International Journal of Advanced and Applied Sciences, 7(7): 1-6
Figures
Fig. 1 Fig. 2 Fig. 3 Fig. 4 Fig. 5
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tables
No Table
----------------------------------------------
References (9)
- Aliev AE, Oh J, Kozlov ME, Kuznetsov AA, Fang S, Fonseca AF, and Zhang M (2009). Giant-stroke, superelastic carbon nanotube aerogel muscles. Science, 323(5921): 1575-1578. https://doi.org/10.1126/science.1168312 [Google Scholar] PMid:19299612
- Cavagna GA, Heglund NC, and Taylor CR (1977). Mechanical work in terrestrial locomotion: Two basic mechanisms for minimizing energy expenditure. American Journal of Physiology-Regulatory, Integrative and Comparative Physiology, 233(5): R243-R261. https://doi.org/10.1152/ajpregu.1977.233.5.R243 [Google Scholar] PMid:411381
- Farley CT, Glasheen J, and McMahon TA (1993). Running springs: Speed and animal size. Journal of Experimental Biology, 185: 71-86. [Google Scholar]
- Kljuno E (2012). Elastic cable-driven bipedal walking robot: Design, modeling, dynamics and controls. Ph.D. Dissertation, Ohio University, Athens, USA. [Google Scholar]
- Kljuno E, Williams RL, and Zhu J (2012). Bipedal walking robot driven by elastic cables. In the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers Digital Collection, Chicago, USA: 1365-1374. https://doi.org/10.1115/DETC2012-70292 [Google Scholar]
- Reilly SM, McElroy EJ, and Biknevicius AR (2007). Posture, gait and the ecological relevance of locomotor costs and energy-saving mechanisms in tetrapods. Zoology, 110(4): 271-289. https://doi.org/10.1016/j.zool.2007.01.003 [Google Scholar] PMid:17482802
- Ruina A, Bertram JE, and Srinivasan M (2005). A collisional model of the energetic cost of support work qualitatively explains leg sequencing in walking and galloping, pseudo-elastic leg behavior in running and the walk-to-run transition. Journal of Theoretical Biology, 237(2): 170-192. https://doi.org/10.1016/j.jtbi.2005.04.004 [Google Scholar] PMid:15961114
- Umberger BR and Martin PE (2007). Mechanical power and efficiency of level walking with different stride rates. Journal of Experimental Biology, 210: 3255-3265. https://doi.org/10.1242/jeb.000950 [Google Scholar] PMid:17766303
- Vanderborght B, Van Ham R, Verrelst B, Van Damme M, and Lefeber D (2008). Overview of the Lucy project: Dynamic stabilization of a biped powered by pneumatic artificial muscles. Advanced Robotics, 22(10): 1027-1051. https://doi.org/10.1163/156855308X324749 [Google Scholar]