International
ADVANCED AND APPLIED SCIENCES
EISSN: 2313-3724, Print ISSN: 2313-626X
Frequency: 12
![]()
Volume 7, Issue 6 (June 2020), Pages: 82-96

----------------------------------------------
Original Research Paper
Title: Formation control of quadrotors via potential field and geometric techniques
Author(s): Abdul-Wahid A. Saif *, Najib Alabsari, Sami El Ferik, Mustafa Elshafei
Affiliation(s):
Systems Engineering Department, King Fahd University of Petroleum and Minerals (KFUPM), Dhahran, Saudi Arabia

* Corresponding Author.
 Corresponding author's ORCID profile: https://orcid.org/0000-0003-2969-1581
Corresponding author's ORCID profile: https://orcid.org/0000-0003-2969-1581
Digital Object Identifier:
https://doi.org/10.21833/ijaas.2020.06.011
Abstract:
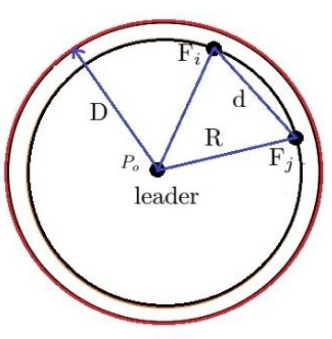
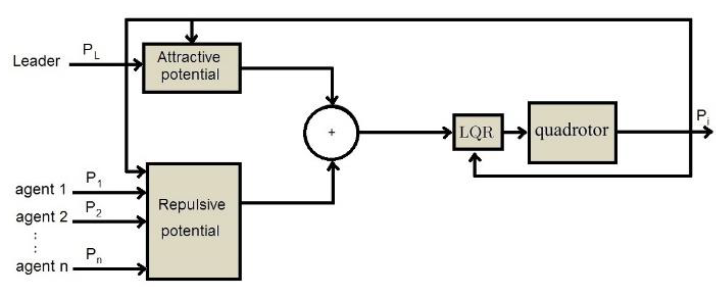
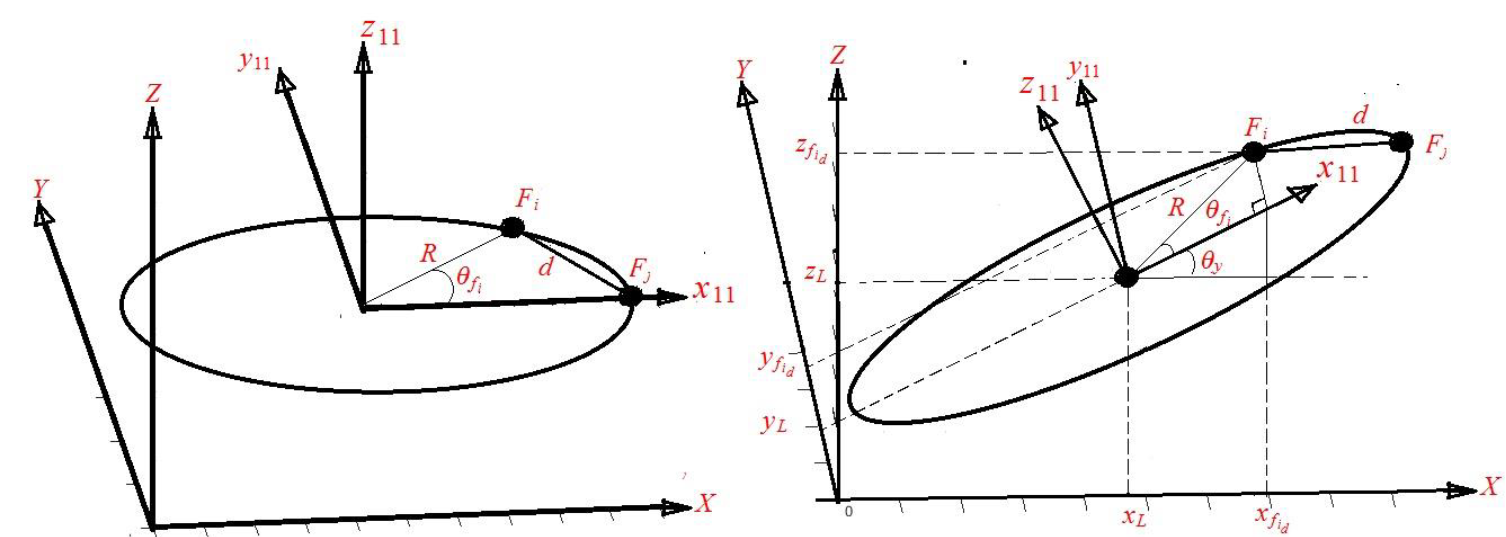
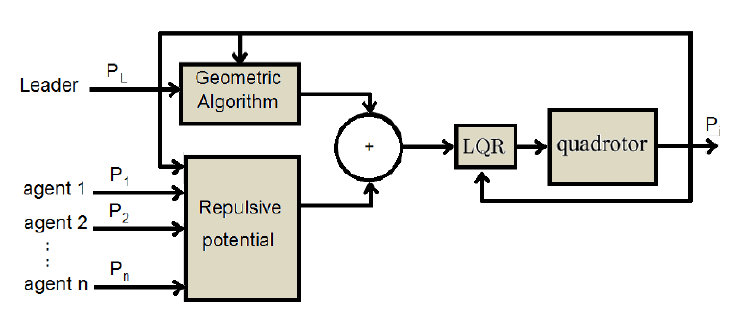
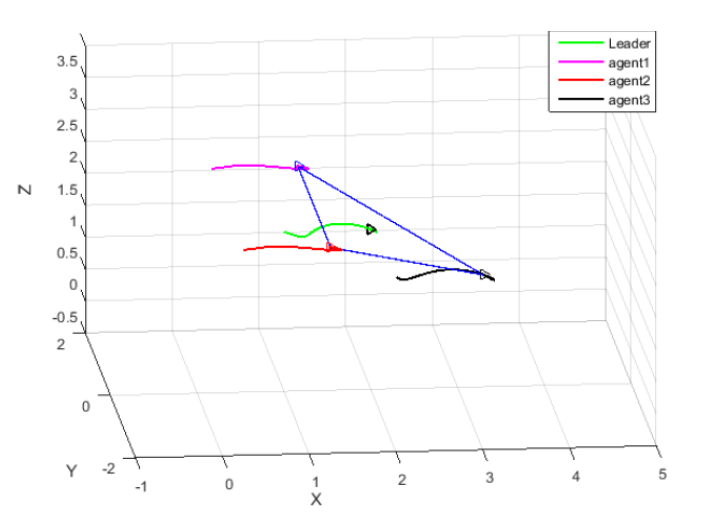
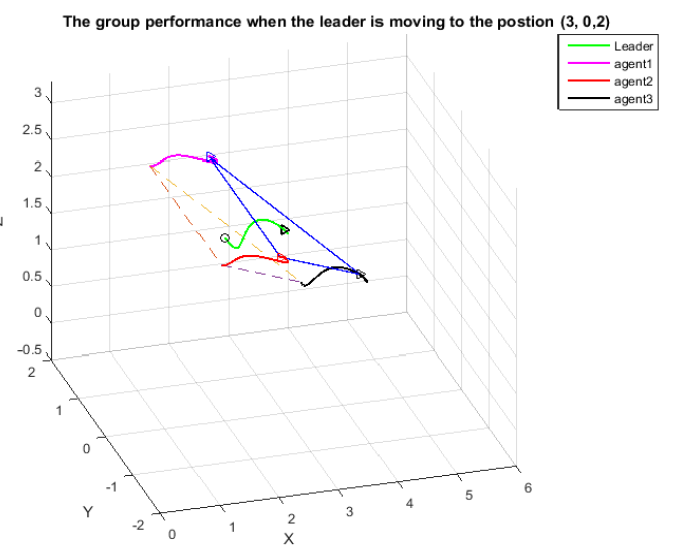
In this paper, two leader-follower formation control methods are proposed for a fleet of quadrotors. The linear quadratic regulator (LQR) control technique is designed to stabilize the linear models generated at different points in the operating space. The leader-follower approach is used to achieve formation control where the position and the heading of the leader are used with offsets as references to be tracked by the followers. In the first method, the potential field technique is proposed to achieve the desired formation. The attractive potential field attracts the followers towards the leader while the repulsive potential field repulses every two neighboring followers in order to keep a required distance between them and also avoid the collision. In the second method, the followers’ positions are dictated by the geometry of the desired formation shape. These followers’ positions are expressed in equations that relate them to the leader position and then given to the followers as references to be followed. An extensive simulation is conducted to examine the validity of the results, and the quadrotor non-linear model is used in all simulations.
© 2020 The Authors. Published by IASE.
This is an
Keywords: Quadrotor, UAV, Formation control, LQR, Potential field
Article History: Received 7 October 2019, Received in revised form 14 March 2020, Accepted 15 March 2020
Acknowledgment:
The author would like to thank the deanship for scientific research, DSR at KFUPM for their support through project number IN41048.
Compliance with ethical standards
Conflict of interest: The authors declare that they have no conflict of interest.
Citation:
Saif AWA, Alabsari N, and El Ferik S et al. (2020). Formation control of quadrotors via potential field and geometric techniques. International Journal of Advanced and Applied Sciences, 7(6): 82-96
Figures
Fig. 1 Fig. 2 Fig. 3 Fig. 4 Fig. 5 Fig. 6 Fig. 7 Fig. 8 Fig. 9 Fig. 10 Fig. 11 Fig. 12 Fig. 13 Fig. 14 Fig. 15
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fig. 16 Fig. 17 Fig. 18 Fig. 19 Fig. 20 Fig. 21 Fig. 22 Fig. 23 Fig. 24 Fig. 25 Fig. 26 Fig. 27 Fig. 28 Fig. 29
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tables
{kind=link}
{kind=link}
{kind=link}
----------------------------------------------
References (26)
- Abbas R and Wu Q (2015). Improved leader follower formation control for multiple quadrotors based AFSA. Telkomnika, 13(1): 85-92. https://doi.org/10.12928/telkomnika.v13i1.994 [Google Scholar]
- Al-Buraiki OS and El Ferik SA (2015). Robotic leader-follower navigation and fleet management control method. U.S. Patent No. 9,146,561, U.S. Patent and Trademark Office, Washington, USA. [Google Scholar]
- Choi YC and Ahn HS (2011). Formation control of quad-rotors in three dimension based on euclidean distance dynamics matrix. In the 11th International Conference on Control, Automation and Systems, IEEE, Gyeonggi-do, South Korea: 1168-1173. [Google Scholar]
- De Vries E and Subbarao K (2011). Cooperative control of swarms of unmanned aerial vehicles. In the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, Florida: 78. https://doi.org/10.2514/6.2011-78 [Google Scholar]
- Delgado LAG and Lopez AED (2009). Formation control for quad-rotor aircrafts based on potential functions. In the Congresso Anual 2009 de la Asociacion de Mexico de Control Automatico (AMCA), Zacatecas, Mexico: 1-6. [Google Scholar]
- Di L (2011). Cognitive formation flight in multi-unmanned aerial vehicle-based personal remote sensing systems. M.Sc. Thesis, Utah State University, Logan, Utah, USA. [Google Scholar]
- Eskandarpour A and Majd VJ (2014). Cooperative formation control of quadrotors with obstacle avoidance and self-collisions based on a hierarchical MPC approach. In the Second RSI/ISM International Conference on Robotics and Mechatronics, IEEE, Tehran, Iran: 351-356. https://doi.org/10.1109/ICRoM.2014.6990926 [Google Scholar]
- Gerkey BP and Matarić MJ (2004). A formal analysis and taxonomy of task allocation in multi-robot systems. The International Journal of Robotics Research, 23(9): 939-954. https://doi.org/10.1177/0278364904045564 [Google Scholar]
- Guerrero JA and Lozano R (2010). Flight formation of multiple mini rotorcraft based on nested saturations. In the International Conference on Intelligent Robots and Systems, IEEE, Taipei, Taiwan: 634-639. https://doi.org/10.1109/IROS.2010.5650335 [Google Scholar]
- Guerrero JA, Castillo P, Salazar S, and Lozano R (2012). Mini rotorcraft flight formation control using bounded inputs. Journal of Intelligent and Robotic Systems, 65(1-4): 175-186. https://doi.org/10.1002/9781118387191 [Google Scholar]
- Guney MA and Unel M (2013). Formation control of a group of micro aerial vehicles (MAVs). In the IEEE International Conference on Systems, Man, and Cybernetics, IEEE, Manchester, UK: 929-934. https://doi.org/10.1109/SMC.2013.163 [Google Scholar]
- Imran IH (2015). Cooperative control of heterogeneous systems based on immersion and invariance adaptive control. Ph.D. Dissertation, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia. [Google Scholar]
- Jazar RN (2010). Theory of applied robotics: kinematics, dynamics, and control. Springer Science and Business Media, Berlin, Germany. https://doi.org/10.1007/978-1-4419-1750-8 [Google Scholar]
- Khatib O (1986). Real-time obstacle avoidance for manipulators and mobile robots. In: Cox IJ and Wilfong GT (Eds), Autonomous robot vehicles: 396-404. Springer, New York, USA. https://doi.org/10.1007/978-1-4613-8997-2_29 [Google Scholar]
- Lee T, Sreenath K, and Kumar V (2013). Geometric control of cooperating multiple quadrotor UAVs with a suspended payload. In the 52nd IEEE Conference on Decision and Control, IEEE, Florence, Italy: 5510-5515. https://doi.org/10.1109/CDC.2013.6760757 [Google Scholar]
- Lewis FL, Vrabie D, and Syrmos VL (2012). Optimal control. John Wiley and Sons, Hoboken, USA. https://doi.org/10.1002/9781118122631 [Google Scholar]
- Marasco AJ (2013). Control of cooperative and collaborative team tactics in autonomous unmanned aerial vehicles using decentralized model predictive control. Library and Archives Canada, Federal institution, Ottawa, Canada. [Google Scholar]
- Mercado DA, Castro R, and Lozano R (2013). Quadrotors flight formation control using a leader-follower approach. In the European Control Conference, IEEE, Zurich, Switzerland: 3858-3863. https://doi.org/10.23919/ECC.2013.6669637 [Google Scholar]
- Oliveira MLC (2011). Modeling, identification and control of a quadrotor aircraft. M.Sc. Thesis, Luleå University of Technology, Luleå, Sweden. [Google Scholar]
- Pilz U, Popov AP, and Werner H (2009). Robust controller design for formation flight of quad-rotor helicopters. In the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, IEEE, Shanghai, China: 8322-8327. https://doi.org/10.1109/CDC.2009.5400593 [Google Scholar]
- Rezaee H, Abdollahi F, and Menhaj MB (2013). Model-free fuzzy leader-follower formation control of fixed wing UAVs. In the 13th Iranian Conference on Fuzzy Systems, IEEE, Qazvin, Iran: 1-5. https://doi.org/10.1109/IFSC.2013.6675677 [Google Scholar] PMid:24505536 PMCid:PMC3915428
- Rinaldi F, Chiesa S, and Quagliotti F (2013). Linear quadratic control for quadrotors UAVs dynamics and formation flight. Journal of Intelligent and Robotic Systems, 70(1-4): 203-220. https://doi.org/10.1007/s10846-012-9708-3 [Google Scholar]
- Saif AWA (2017). Feedback linearization control of quadrotor with tiltable rotors under wind gusts. International Journal of Advanced and Applied Sciences, 4(10): 150-159. https://doi.org/10.21833/ijaas.2017.010.021 [Google Scholar]
- Turpin M, Michael N, and Kumar V (2012). Decentralized formation control with variable shapes for aerial robots. In the IEEE International Conference on Robotics and Automation, IEEE, Saint Paul, USA: 23-30. https://doi.org/10.1109/ICRA.2012.6225196 [Google Scholar]
- Wang Z and Gu D (2010). A leader-follower flocking system based on estimated flocking center. In: Liu H, Gu D, Howlett R, and Liu Y (Eds), Robot Intelligence: 191-208. Springer, London, UK. https://doi.org/10.1007/978-1-84996-329-9_9 [Google Scholar]
- Zhang Y and Mehrjerdi H (2013). A survey on multiple unmanned vehicles formation control and coordination: Normal and fault situations. In the International Conference on Unmanned Aircraft Systems, IEEE, Atlanta, USA: 1087-1096. https://doi.org/10.1109/ICUAS.2013.6564798 [Google Scholar]